



永磁同步電機降階模型抽取和矢量控制算法仿真 
1 前言 在電機設計特別是新能源汽車永磁同步電機設計過程中,通常需將電機與控制系統進行矢量控制算法聯合仿真,以得到更加精確得仿真分析結果。控制系統聯合仿真過程中,由于控制器開關頻率高,仿真步長短,計算時間長等特點,如果直接將有限元模型直接與控制系統進行聯合仿真,仿真時間跟速度通常無法滿足工程需要。
3268 1
TomZ ??? 4年前
主機廠如何提前搞定主動氣動 & 扭矩矢量控制標定 
SimCenter 設置該測試是在 DiM400 動態駕駛模擬器上進行的,運行在 VI-CarRealTime 模型上,該模型集成了: 氣動特性圖譜 扭矩矢量分配算法 可調控制參數和增益 閉環穩定性邏輯所有參數均可實時訪問和調整,這使得工程師能夠系統地探索不同的控制策略。
2571 1
VI-grade中國 ??? 1月前
主機廠如何提前搞定主動氣動 & 扭矩矢量控制標定 
SimCenter 設置該測試是在 DiM400 動態駕駛模擬器上進行的,運行在 VI-CarRealTime 模型上,該模型集成了: 氣動特性圖譜 扭矩矢量分配算法 可調控制參數和增益 閉環穩定性邏輯所有參數均可實時訪問和調整,這使得工程師能夠系統地探索不同的控制策略。高保真度的模擬環境確保駕駛員能夠直接感知到車輛行為的細微變化。04.
1155
技術鄰公告 ??? 1月前
力矢量控制器 漢航FAD-16 
為解決以上問題,漢航工程師根據多年的試驗工程經驗開發了一種適用于GVT試驗的更為便捷的多激振器控制方式--力矢量控制器漢航FAD-16。 使用力矢量控制器FAD-16,僅需一個信號輸出通道,即可對多個激振器進行GVT試驗所需的全部操作,既減少了所需的輸出通道數量,同時完美地解決了多個輸出通道間信號同步的問題。
2170
漢航 ??? 3年前
永磁同步電機電機的降階模型抽取和矢量控制電路仿真 

ANSYS永磁同步電機電機的降階模型抽取方法3. ANSYS 結合電機本體高精度降階模型的矢量控制算法實現方法
3805 2
Ansys中國 ??? 6年前
MBSE產品模型架構應用:基于模型驅動架構概念的自主水下航行器控制器的MBSE應用(上) 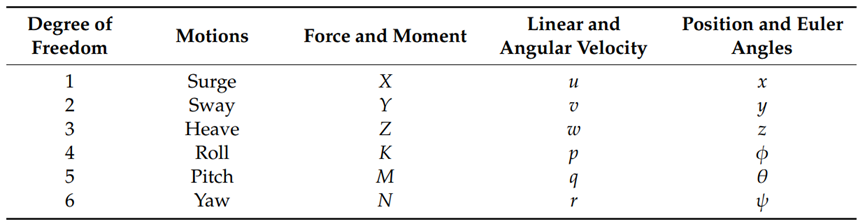
模型矩陣M、C(ν)和D(ν)分別表示慣性、科里奧利和阻尼,而 g(η)是重力和浮力的矢量。在公式(2)的右側,τ(v,u)是作用在AUV上的合力和力矩的矢量,u表示控制輸入。 狀態空間離散性模型可用于模擬AUV的控制演化,該模型用于通過使用EKF或UKF方法估計AUV的狀態;控制系統的運動可以描述為公式(3)所示。
2565
一起學MBSE ??? 2年前
MBSE產品模型架構應用:基于模型驅動架構概念的自主水下航行器控制器的MBSE應用(下) 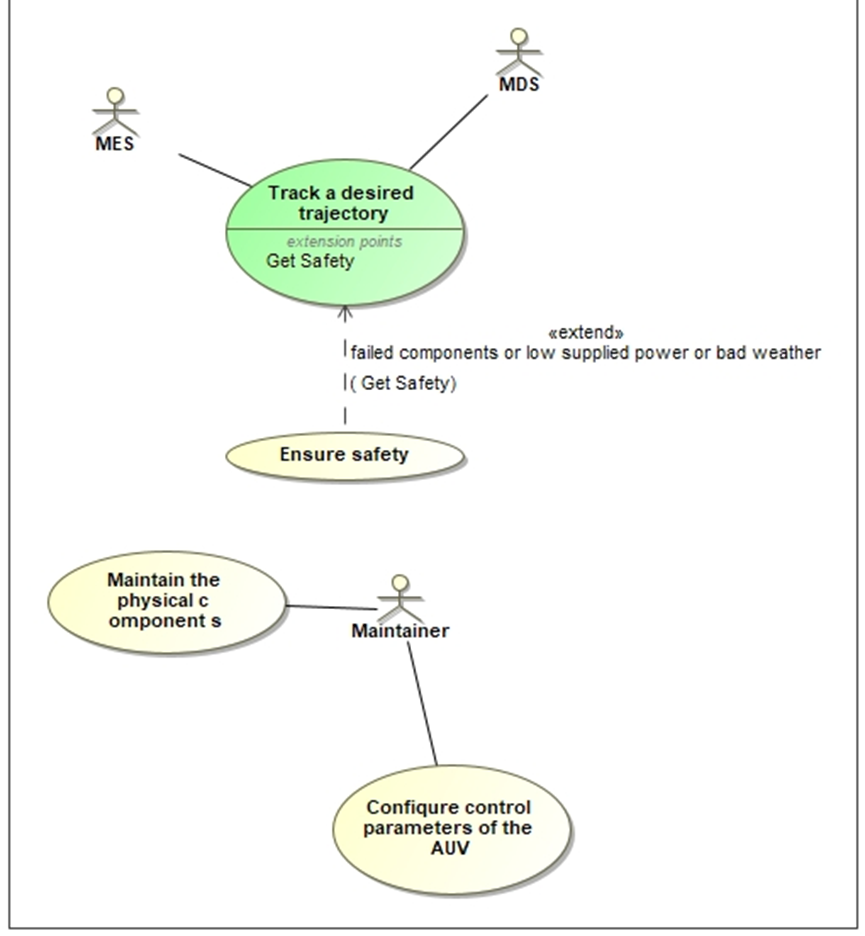
圖5.AUV控制器實時壓縮的協作圖 圖6.AUV控制器的實時壓縮類圖 這里,離散部件的壓縮由AUV控制器HA中的情況Q和過渡A組成;連續部件的壓縮包含連續狀態空間X;IGCB的壓縮實現了具體的全局連續行為,如f∈F,其中f直接來自公式(3),實現的功能模塊圖(圖4)可以在f中實現,用于估計AUV狀態;外部接口的壓縮是一個中介
2168 1 1
一起學MBSE ??? 2年前
永磁同步電機矢量控制詳細搭建過程 
詳細的介紹了永磁同步電機矢量控制,包括了利用simulink自帶坐標變換以及SVPWM 模塊搭建模型,以及自己完整搭建SVPWM模塊和PI模塊,并進行PI參數調試。
1390 1
心中的日月 ??? 4年前
永磁同步電機(PMSM)矢量控制的Simulink實現 
大致介紹了永磁同步電機的矢量控制方法(電流滯環控制和SVPWM控制)最后補充了PI調節的一個不成熟的自動整定方法。
1532
林糊涂 ??? 4年前
【技術貼】基于模型的xCU控制系統開發 
另外AVL集成及開放式開發平臺Model.CONNECT?支持通過CAN、TCP/IP或者UDP協議將電腦中運行的仿真模型(虛擬的部件)與真實的控制器直接相連或者與HiL系統相連;值得一提的是M.C.還支持將一些本身計算速度能夠達到實時性,但是并不能支持實時操作系統的仿真模型集成到平臺上,完美地實現了虛擬(非實時系統)與真實(實時系統)世界的鏈接。
2361 1 1
AVL先進模擬技術 ??? 3年前
MBSE:基于模型的系統工程在航空發動機控制設計中的應用 
通過用例圖、活動圖、時序圖、狀態機圖等模型對地面起動過程進行建模分析,發現并完善了自然語言在起動控制邏輯描述方面存在的不足。最后利用狀態機進行了發動機地面起動模型仿真,對地面起動控制邏輯進行了驗證。 在利用活動圖梳理發動機地面起動功能流過程中,發現使用自然語言描述復雜系統時存在以下 2 類問題。 1)文字表述存在二義性。
5475
一起學MBSE ??? 2年前
Moldex3D模流分析之如何設定實體模型的閥式澆口控制屬性? 
備注 1.澆口控制的設定僅適用于熱澆道。 2.若澆口控制套用于實體模型,僅可有一個進澆點。
2036
Moldex3D 中國 ??? 2年前
Moldex3D模流分析之如何設定實體模型的閥式澆口控制屬性 
備注 1.澆口控制的設定僅適用于熱澆道。 2.若澆口控制套用于實體模型,僅可有一個進澆點。
2017
Moldex3D 中國 ??? 2年前
1-106基于matlab的粒子群算法與 Simulink 模型之間連接的橋梁是粒子(即PID控制器參數)和該粒子對應的適應值(即控制系統的性能指標) 
優化過程如下:PSO 產生粒子群(可以是初始化粒子群,也可以是更新后的粒子群),將該粒子群中的粒子依次賦值給 PID 控制器的參數 Kp、Ki、Kd,然后運行控制系統的Simulink 模型,得到該組參數對應的性能指標,該性能指標傳遞到 PSO中作為該粒子的適應值,最后判斷是否可以退出算法。程序已調通,可直接運行。購買后可下載視頻中的源程序文件。
401
matlab應用與學習 ??? 1年前
abaqus 中的 Johnson-Cook 模型如何控制損傷起始位置? 
在運用JC本構模型的時候,不知如何控制損傷開始的位置,在學習總結之后分享出來,希望和大家一起進步。JC本構模型包括塑性硬化段和損傷演化段1 JC本構——塑性硬化段方程:式中:A,B,n,m 是控制塑性段硬化的材料參數,等號右側第二個括號與第三個括號分別是應變率和溫度對于塑性硬化段的影響。
5469 6 2
ⅠⅠⅠ ??? 2年前
用Python控制Comsol自動運行方法(三):構建并訓練深度神經網絡代理模型 
整個過程都是自動化運行,相比于直接使用Comsol本身自帶的DNN模型來說要更加高效。
3983
鋰電芯動 ??? 11月前
面向自動駕駛:四輪獨立驅動/轉向電動汽車配置與控制綜述與展望 
扭矩分配算法用于調整總縱向力 Fx 和外部橫擺力矩 DMz,即直接橫擺力矩控制 (DYC)。已經研究了各種扭矩分配算法,包括直接分配方法[72]、仿射控制分配[73]、序列最小二乘法[74]、加權最小二乘法[75]、動態分配[76]、模型預測控制 (MPC)[77]等。扭矩分配后,將計算出四個車輪的目標驅動/制動扭矩。
3826
駕駛哥 ??? 4年前
基于hypermesh的【整車模型搭建14】——整車碰撞的控制卡片介紹(附k文件) 
在實際運用中,工程師常常是直接調用現有的控制卡片,只有少數幾個卡片需要修改。二 知識要點:1 如何創建控制卡片;2 整車碰撞中常用控制卡片介紹;3 常用控制卡片參數設置;4 通過案例介紹常用結果文件。三 課程相關問題,請在評論中提問,不回私信哦。四 模型來自開源網站,并且進行了修改。k文件在附件中下載。
1657 6
包子123 ??? 8年前
18基于matlab的二階動態系統的滑膜控制,程序已調通,可直接運行。 
基于matlab的二階動態系統的滑膜控制,程序已調通,可直接運行。標價為程序價格,不包含售后。程序保證可直接運行。
1658
matlab應用與學習 ??? 2年前
自主水下航行器 (AUV) | 近實時仿真與控制助力實現水下機動航行 
早期的控制系統包含一組比例積分微分(PID) 控制器。通過從加速度計、羅盤、深度計和其他體載傳感器獲取輸入,每個控制器都與單個自由度相關聯。最近,該團隊已經開始評估模型預測控制(MPC) 方法,包括線性、線性時變和非線性 MPC 方法,以及線性二次調節器(LQR) 設計。 通過將控制器模型與被控對象模型連接起來,針對特定的水下機動航行運行了閉環仿真。
3068 3 2
泡沫oO ??? 2年前
20條/頁 
 333
333 跳至頁

技術鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
